Battery holders and ST-Link
I'm printing a new version of my round robot chassis with PETG.
I had one initial objective: to add better battery enclosures, because the batteries on the first one just fell out. So I added some integral ones. I looked around Thingiverse and found these, which led back to these. I actually designed my own: since I needed to resize to CR123, and didn't find the SCAD files all that readable: full of magic numbers... I used the clips from the second design, because they were better specified, and not expensive from rs-components.
Anyway, I printed that version in PETG. When I came to get it off the plate, the base layer just stayed on the plate: the adhesion between the plate and the base was greater than the adhesion between the shell and the filling!
I've refactored the chassis quite a lot to deal with that. The latest iteration is printing now.
The other change was to support a Nucleo 64 board like the STM32F303RE one. I've managed to remove the programmer, which makes it fit, and then attach it again via some wires:
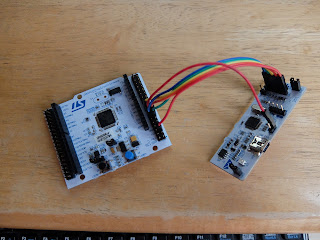 I think I can make an adaptor board with a 2x8 connector on the end that plugs into the Nucleo board. Each different Nucleo board will need a different one, but I guess I'll have one st-link for every board, so I might as well solder the adaptor onto the st-link. I'm waiting for the 2x8 headers to arrive from China.
I think I can make an adaptor board with a 2x8 connector on the end that plugs into the Nucleo board. Each different Nucleo board will need a different one, but I guess I'll have one st-link for every board, so I might as well solder the adaptor onto the st-link. I'm waiting for the 2x8 headers to arrive from China.
In the next version of the board, I neglected to allow space for the connector I soldered onto the top of the gear motors. I tried to mill away the material, but that proved to difficult.
In another version of the board, I needed to mill away a little bit of material to get the motors in. I also tried to use captive nuts, but the support material was hard to get out, so I guess another version is probably in order.
My model doesn't have a recycling number on it, but it seems like a lot of sorting is done automatically, so I guess I'll just throw them in the recycling and hope for the best.
I had one initial objective: to add better battery enclosures, because the batteries on the first one just fell out. So I added some integral ones. I looked around Thingiverse and found these, which led back to these. I actually designed my own: since I needed to resize to CR123, and didn't find the SCAD files all that readable: full of magic numbers... I used the clips from the second design, because they were better specified, and not expensive from rs-components.
Anyway, I printed that version in PETG. When I came to get it off the plate, the base layer just stayed on the plate: the adhesion between the plate and the base was greater than the adhesion between the shell and the filling!
I've refactored the chassis quite a lot to deal with that. The latest iteration is printing now.
The other change was to support a Nucleo 64 board like the STM32F303RE one. I've managed to remove the programmer, which makes it fit, and then attach it again via some wires:

In the next version of the board, I neglected to allow space for the connector I soldered onto the top of the gear motors. I tried to mill away the material, but that proved to difficult.
In another version of the board, I needed to mill away a little bit of material to get the motors in. I also tried to use captive nuts, but the support material was hard to get out, so I guess another version is probably in order.
My model doesn't have a recycling number on it, but it seems like a lot of sorting is done automatically, so I guess I'll just throw them in the recycling and hope for the best.


